Introduction
LiDAR mapping is a well-known technique used for quickly generating precise geo-referenced spatial information of the Earth’s form and surface. An early 1960s technology, Light Detection and Ranging LiDAR, creates high-resolution models with an ability to see through objects such as walls, trees or any such obstacle. Using LiDAR readings, distance between different objects in space can be determined with greater accuracy, and precision thus enabling construction of a 3D digital representation of the region. Light in the form of a pulsed laser is used in LIDAR. However, the use of light to measure distance has its own shortcomings such as the inability to see dark-coloreds objects, less-reflective paint colors and also more reflective, lighter colors. The present paper presents existing challenges in LiDAR, and the various solutions provided by researchers to address the same. It also covers the various applications of LiDAR, and key players, startups and collaborations in the space.
High power requirement[1]
Most automotive companies pride themselves on the high speed, resolution, and efficiency of their autonomous vehicles. Sensors in autonomous vehicles are required to work with high accuracy. As compared to other sensors, LiDAR’s power consumption is the highest, so the batteries may be drained very quickly. This will decrease the efficiency of a car’s battery which, in turn, will affect the vehicle’s range. Lower power efficiency means the customers must recharge, or even replace parts more often as opposed to radar or other types of sensors which are power-efficient. In addition, the performance of LiDAR sensors depends on weather conditions. LiDAR cannot capture images of surroundings accurately, especially in fog, snow, or dust conditions. LiDAR sensors and radar systems that can address such problems are still in the developmental stage. A recent patent application that discloses a solution to one such problem is presented below.
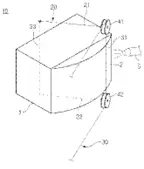
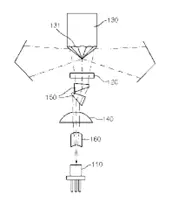
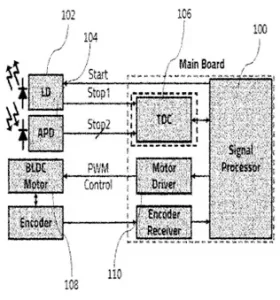 Carnavicom, in WO2022080586A1[2], has addressed the problem of high-power consumption. The system has a transmitter (102) for outputting light. A receiver (104) receives the light reflected from a target. A signal processing unit (100) measures distance of the target by using the received light. A time measurement unit (106) detects time difference between a time point at which light is emitted and a time point at which the reflected light is received. The signal processing unit changes resolution of the transmitter according to traveling speed of a moving object or a surrounding environment. The transmitter outputs the light at a resolution determined by the signal processing unit such that a number of laser outputs from the transmission unit are increased resulting in an increase in the resolution and the viewing angle range. The signal processing unit detects the time difference between a first stop signal having information on a transmission time point of light and a second stop signal having information on the reception time of reflected light at pulse period. The system can thus reduce power consumption by controlling the output resolution of the laser according to the traveling speed or the surrounding environment.
Carnavicom, in WO2022080586A1[2], has addressed the problem of high-power consumption. The system has a transmitter (102) for outputting light. A receiver (104) receives the light reflected from a target. A signal processing unit (100) measures distance of the target by using the received light. A time measurement unit (106) detects time difference between a time point at which light is emitted and a time point at which the reflected light is received. The signal processing unit changes resolution of the transmitter according to traveling speed of a moving object or a surrounding environment. The transmitter outputs the light at a resolution determined by the signal processing unit such that a number of laser outputs from the transmission unit are increased resulting in an increase in the resolution and the viewing angle range. The signal processing unit detects the time difference between a first stop signal having information on a transmission time point of light and a second stop signal having information on the reception time of reflected light at pulse period. The system can thus reduce power consumption by controlling the output resolution of the laser according to the traveling speed or the surrounding environment.