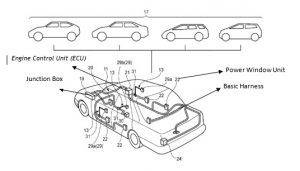
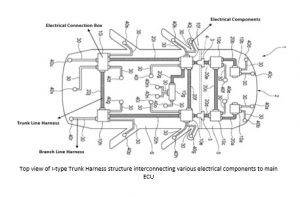
Automotive manufacturing witnesses the highest deployment of robotic automation. Welding, assembly, machine tending, material removal, part transfer etc. are the assembly operations best suited to robotic automation. However, when it comes to tasks that need judgement and decision making, there is still scope for improvement in the performance of robots. Wire harness is the nervous system of automobiles, consisting of wire and connector assemblies of multiple sizes and shapes. The harness carries various control and power signals between the main control unit, battery and various parts of the automobile. Assembling such cables with connectors requires high levels of skill and is most time -consuming. It involves pairing the cables with appropriate connectors and fixing the complex wiring structure inside the automobile. The task of installing wire harnesses in car bodies has traditionally been difficult for robots. Therefore, multiple approaches such as simplifying the harness architecture and improving the robot’s capabilities are being adopted to solve the complex problems associated with wire harness.
Simplification of the harness architecture
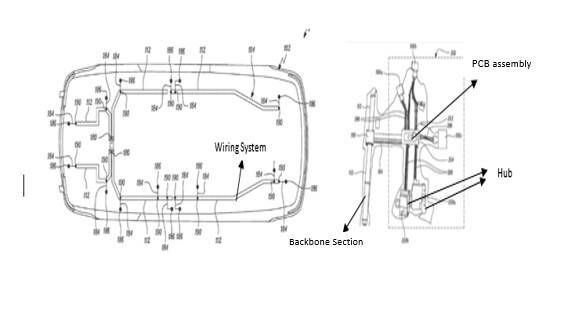
A recent patent publication (US20190217794) on modular wiring harness attracted global attention. The patent application from Tesla claims ease of assembling the wiring harness during vehicle manufacture. The patent also discloses reduction in the total length of wires.
The patent application identifies problems in wire harness and provides solutions as listed below:
| Critical issues with existing wire harness | Solutions provided by Tesla |
|---|---|
| Multiple wiring systems are needed to connect different electrical components to different harnesses. | Packaged subsystems are defined for each assembly so that the number of connections to the main hub is minimized. |
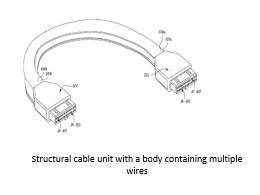
| Connectors for current harness systems are not so rigid. | Tesla’s application reveals more rigid wiring architecture that is easy for robots to manipulate. |
| Assembling wire harness is currently done by skilled workers as it is considered to be difficult for automation by robots. | Sub-assemblies reduce wire lengths, enabling assembly by robots. |
Tesla’s innovative wiring architecture presented in the patent application is reproduced below.